
Autonomous driving: What does a car need to be able to do it and when can we use it?
Cruise control helps maintain speed, a lane departure warning system protects against unintentional lane changes, and the blind spot warning system indicates cars or people in the blind spot.
New cars offer many such individual assistance systems, making driving safer. Nevertheless, the driver is still responsible for steering the car and determining the speed.
But this is set to change in the future. Autonomous driving is supposed to bring more safety and efficiency, among other things, and give drivers the opportunity to make better use of their time.

But how long do we have to wait for this and what is the current status?
In general, the road to autonomous driving is divided into 5 stages:
- Assisted driving
- Partially automated driving
- Highly automated driving
- Fully automated driving
- Autonomous driving
Currently, vehicles with levels 3-5 are already being driven on test routes; but in defined areas, vehicles with a maximum of level 4 are allowed to participate in normal traffic.
It will therefore be some time before fully autonomous driving is possible. For the past decade, automakers, startups and tech companies have been working to develop new technologies that can make autonomous driving possible. Despite the long development time, however, it is still difficult for experts to predict when it will be possible to use fully autonomous driving.
Technically speaking, the implementation of autonomous driving poses many challenges.
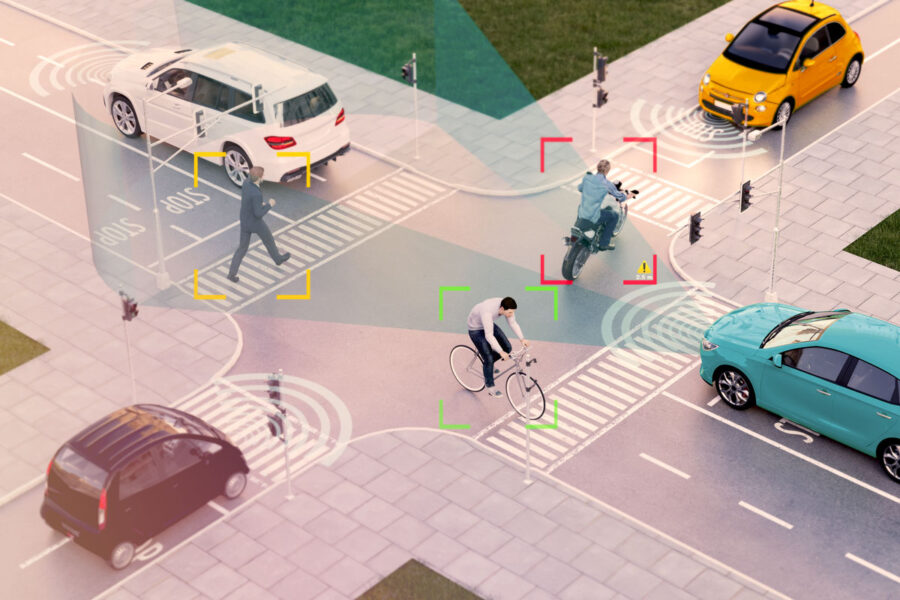
The car must be able to fully perceive its surroundings and correctly assess each individual situation. This includes perceiving objects and estimating their distance. To make this possible, cars are equipped with numerous sensors (radar and lidar sensors) and cameras, and the car works with a GPS system.
A computer evaluates the data obtained and determines an appropriate response. This is also connected to the car’s control elements, i.e. the steering wheel, the accelerator and brake pedals, and finally the engine. The goal is perfect interaction that enables safe navigation.
Communication in traffic
Exchange among cars is also important. For example, cars have to exchange signals at an intersection and then find a regulation for the right of way. Traffic signs and traffic lights will later also be part of the communication process and “exchange” signals with the cars.
One of the ways in which this will work is via mobile communications networks, which will therefore have to be expanded even further.
For the whole process to work, the cars will have to learn how to react correctly in all kinds of traffic situations. It is therefore important that they are repeatedly sent on test drives.
Pedestrians crossing the street, cyclists riding alongside cars on the road, traffic situations such as traffic circles, bicycle lanes, slow-moving vehicles such as tractors or trucks – the car must later be able to assess all these situations correctly in order to get passengers safely from A to B and protect other road users. During test drives, these vehicles are not driven by normal drivers, but by special test engineers.
Through constant testing, smoother driving is then possible step by step, since many situations are already known. More safety is then provided by the opportunity to unlock and test additional functions again and again.






